伴随大模型迭代速度越来越快,训练集群规模越来越大,高频率的软硬件故障已经成为阻碍训练效率进一步提高的痛点,检查点(Checkpoint)系统在训练过程中负责状态的存储和恢复,已经成为克服训练故障、保障训练进度和提高训练效率的关键。
近日,字节跳动豆包大模型团队与香港大学联合提出了 ByteCheckpoint。
这是一个 PyTorch 原生,兼容多个训练框架,支持 Checkpoint 的高效读写和自动重新切分的大模型 Checkpointing 系统,相比现有方法有显著性能提升和易用性优势。本文介绍了大模型训练提效中 Checkpoint 方向面临的挑战,总结 ByteCheckpoint 的解决思路、系统设计、I/O 性能优化技术,以及在存储性能和读取性能测试的实验结果。
Meta 官方最近披露了在 16384 块 H100 80GB 训练集群上进行 Llama3 405B 训练的故障率 —— 短短 54 天,发生 419 次中断,平均每三小时崩溃一次,引来不少从业者关注。
正如业内一句常言,大型训练系统唯一确定的,便是软硬件故障。随着训练规模与模型大小的日益增长,克服软硬件故障,提高训练效率成为大模型迭代的重要影响要素。
Checkpoint 已成为训练提效关键。在 Llama 训练报告中,技术团队提到,为了对抗高故障率,需要在训练过程中频繁地进行 Checkpoint ,保存训练中的模型、优化器、数据读取器状态,减少训练进度损失。
字节跳动豆包大模型团队与港大近期公开了成果 —— ByteCheckpoint ,一个 PyTorch 原生,兼容多个训练框架,支持 Checkpoint 的高效读写和自动重新切分的大模型 Checkpointing 系统。
与基线方法相比,ByteCheckpoint 在 Checkpoint 保存上性能提升高达 529.22 倍,在加载上,性能提升高达 3.51 倍。极简的用户接口和 Checkpoint 自动重新切分功能,显著降低了用户上手和使用成本,提高了系统的易用性。
目前论文成果已对外公开。
ByteCheckpoint: A Unified Checkpointing System for LLM Development
Checkpoint 技术在大模型训练中的技术挑战
当前 Checkpoint 相关技术在支持大模型训练提效中,共面临四个方面挑战:
现有系统设计存在缺陷,显著增加训练额外 I/O 开销
在训练工业级别的大语言模型 (LLM) 的过程中,训练状态需要通过检查点技术 ( Checkpointing ) 进行保存和持久化。通常情况下,一个 Checkpoint 包括 5 个部分 (模型,优化器,数据读取器,随机数和用户自定义配置)。这一过程往往会给训练带来分钟级别的阻塞,严重影响训练效率。
在使用远程持久化存储系统的大规模训练场景下,现有的 Checkpointing 系统没有充分利用 Checkpoint 保存过程中 GPU 到 CPU 内存拷贝 ( D2H 复制),序列化,本地存盘,上传到存储系统各个阶段的执行独立性。
此外,不同训练进程共同分担 Checkpoint 存取任务的并行处理潜力也没有被充分发掘。这些系统设计上的不足增加了 Checkpoint 训练带来的额外 I/O 开销。
Checkpoint 重新切分困难,手动切分脚本开发维护开销过高
在 LLM 的不同训练阶段 (预训练到 SFT 或者 RLHF ) 以及不同任务 (从训练任务拉取不同阶段的 Checkpoint 进行执行自动评估) 之间进行 Checkpoint 迁移时,通常需要对保存在持久化存储系统中的 Checkpoint 进行重新切分 ( Checkpoint Resharding ) ,以适应下游任务的新并行度配置以及可用 GPU 资源的配额。
现有 Checkpointing 系统 [1, 2, 3, 4] 都假设存储和加载时,并行度配置和 GPU 资源保持不变,无法处理 Checkpoint 重新切分的需求。工业界目前常见的解决办法是 —— 为不同模型定制 Checkpoint 合并或者重新切分脚本。这种方法带来了大量开发与维护开销,可扩展性较差。
不同的训练框架 Checkpoint 模块割裂,为 Checkpoint 统一管理和性能优化带来挑战
在工业界的训练平台上,工程师与科学家往往会根据任务特性,选择合适框架 (Megatron-LM, FSDP, DeepSpeed, veScale) 进行训练,并保存 Checkpoint 到存储系统。然而,这些不同的训练框架都具有自己独立的 Checkpoint 格式以及读写模块。不同训练框架的 Checkpoint 模块设计不尽相同,为底层系统进行统一的 Checkpoint 管理以及性能优化带来了挑战。
分布式训练系统的用户面临多重困扰
从训练系统的用户( AI 研究科学家或工程师)的角度出发,用户使用分布式训练系统时,在 Checkpoint 方向往往会被三个问题困扰:
1)如何高效地存储 Checkpoint ,在不影响训练效率的情况下保存 Checkpoint。
2)如何重新切分 Checkpoint ,对于在一个并行度下存储的 Checkpoint ,根据新的并行度正确读入。
3)如何把训练得到的产物上传到云存储系统上( HDFS,S3 等),手动管理多个存储系统,对用户来说学习和使用成本较高。
针对上述问题,字节跳动豆包大模型团队和香港大学吴川教授实验室联合推出了 ByteCheckpoint 。
ByteCheckpoint 是一个多训练框架统一,支持多存储后端,具备自动 Checkpoint 重新切分能力的高性能分布式 Checkpointing 系统。ByteCheckpoint 提供了简单易用的用户接口 ,实现了大量 I/O 性能优化技术提高了存储和读取 Checkpoint 性能,并支持 Checkpoint 在不同并行度配置的任务中的灵活迁移。
系统设计
存储架构
ByteCheckpoint 采用了元数据 / 张量数据分离的存储架构,实现了 Checkpoint 管理与训练框架和并行度的解耦合。
不同训练框架中的模型以及优化器的张量切片 ( Tensor Shard) 存储在 storage 文件中,元信息 (TensorMeta, ShardMeta, ByteMeta) 存储到全局唯一的 metadata 文件中。
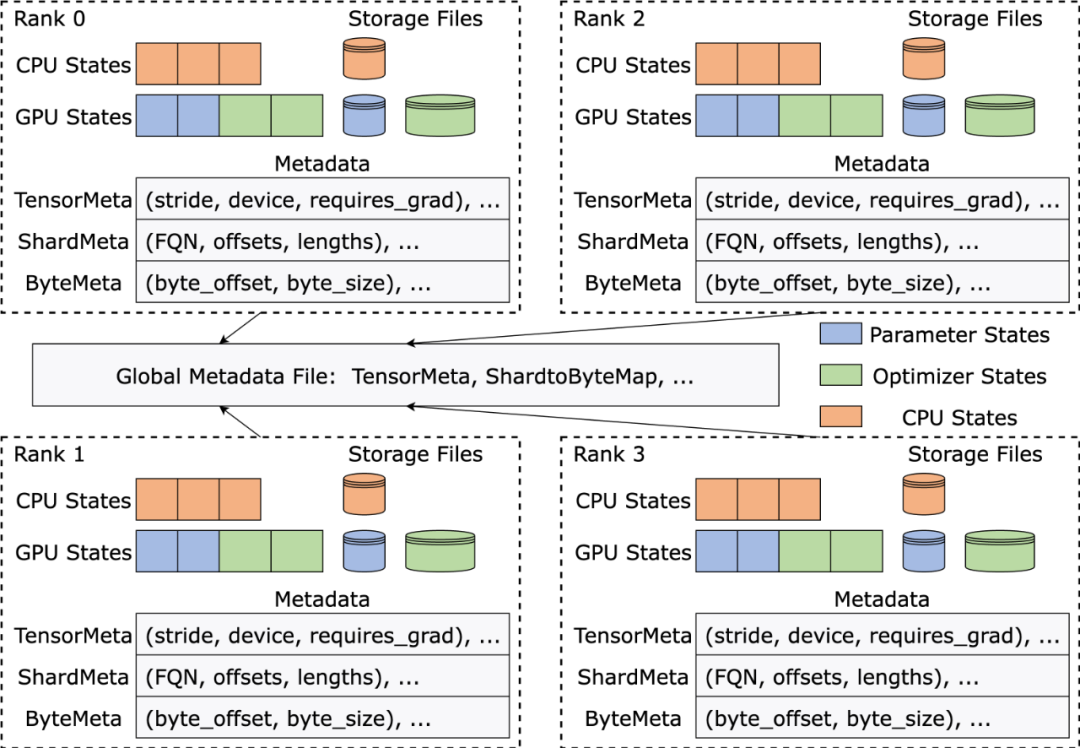
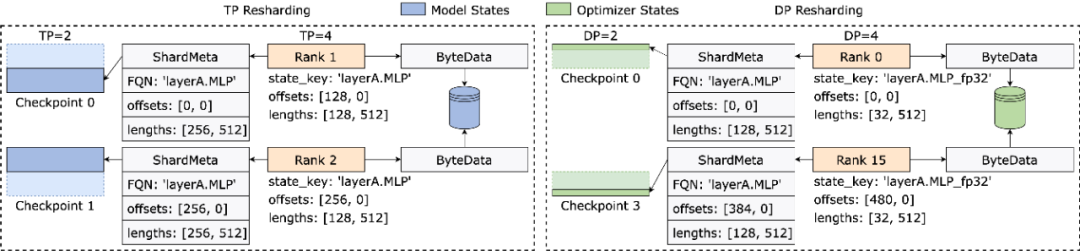
当使用不同的并行度配置读取 Checkpoint 时,如下图所示,每个训练进程只需要根据当前的并行度设置查询元信息,便能够获取进程所需要张量的存储位置,再根据位置直接读取,实现自动 Checkpoint 重新切分。
巧解不规则张量切分
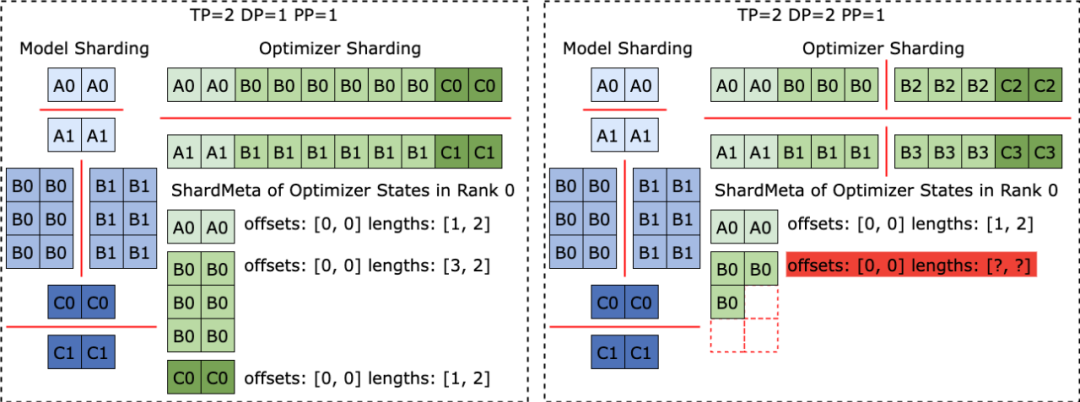
不同训练框架在运行时,往往会把模型或者优化器中张量的形状摊平 ( Flatten ) 成一维,从而提高集合通信性能。这种摊平操作给 Checkpoint 存储带来了不规则张量切分 (Irregular Tensor Sharding) 的挑战。
如下图所示,在 Megatron-LM (由 NVIDIA 研发的分布式大模型训练框架) 和 veScale (由字节跳动研发的 PyTorch 原生分布式大模型训练框架) 中,模型参数对应的优化器状态会被展平为一维后合并,再根据数据并行度切分。这导致张量被不规则地切分到不同进程之中,张量切片的元信息无法使用偏移量和长度元组来表示,给存储和读取带来困难。
不规则张量切分的问题在 FSDP 框架中也同样存在。
为消除不规则切分的张量切片 ,FSDP 框架在存储 Checkpoint 之前会在所有进程上对一维张量切片进行 all-gather 集合通信以及 D2H 复制操作,以获取完整不规则切分的张量。这种方案带来了极大的通信和频繁的 GPU-CPU 同步开销,严重影响了 Checkpoint 存储的性能。
针对这个问题,ByteCheckpoint 提出了异步张量合并 (Asynchronous Tensor Merging) 技术。
ByteCheckpoint 首先找出不同进程中被不规则切分的张量,之后采用异步的 P2P 通信,把这些不规则的张量分配到不同进程上进行合并。所有针对这些不规则张量的 P2P 通信等待(Wait) 以及张量 D2H 复制操作被推迟到他们即将进入序列化阶段的时候,从而消除了频繁的同步开销,也增加了通信与其他 Checkpoint 存储流程的执行重叠度。
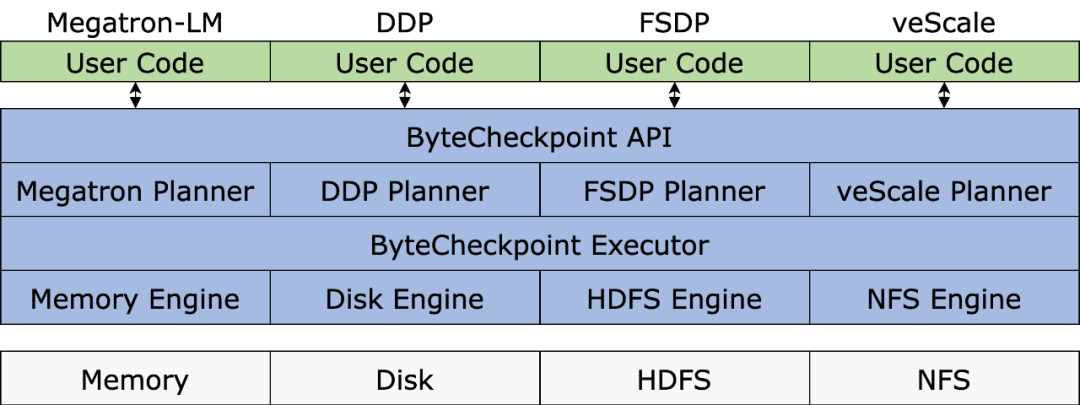
系统架构
下图展示了 ByteCheckpoint 的系统架构:
API 层为不同训练框架提供了简单,易用且统一的读取和写入 ( Save )和读取( Load )接口。
Planner 层会根据存取对象为不同训练进程生成存取方案,交由 Execution 层执行实际的 I/O 任务。
Execution 层执行 I/O 任务并与 Storage 层进行交互,利用各种 I/O 优化技术进行高性能的 Checkpoint 存取。
Storage 层管理不同的存储后端,并在 I/O 任务过程中根据不同存储后端进行相应的优化。
分层设计增强了系统的可扩展性,以便未来支持更多的训练框架和存储后端。
API 用例
ByteCheckpoint 的 API 用例如下:
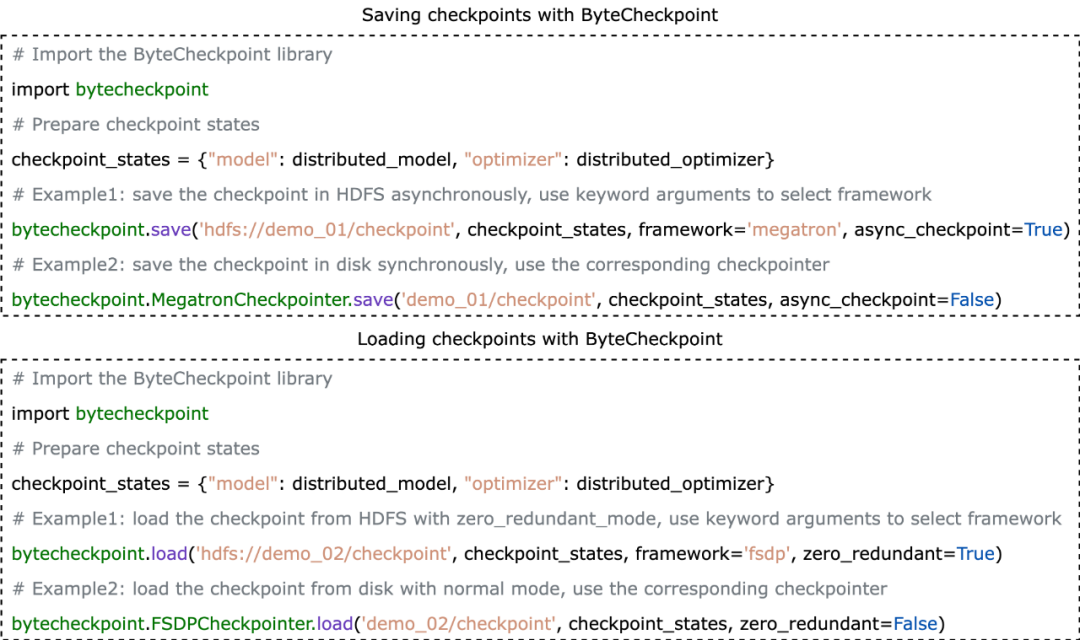
ByteCheckpoint 提供了极简 API ,降低了用户上手的成本。用户在存储和读取 Checkpoint 时,只需要调用存储和加载函数,传入需要存储和读取的内容,文件系统路径和各种性能优化选项。
I/O 性能优化技术
Checkpoint 存储优化
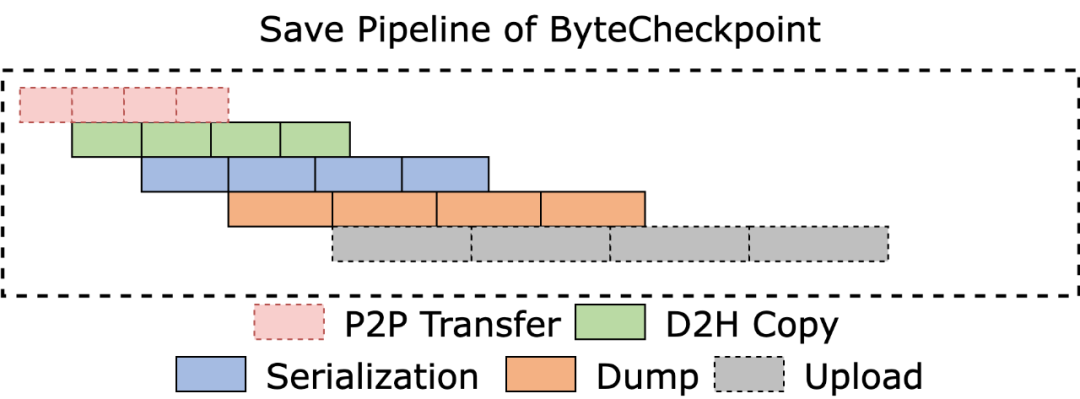
流水线执行
如下图所示,ByteCheckpoint 设计了全异步的存储流水线(Save Pipeline),将 Checkpoint 存储的不同阶段(P2P 张量传输,D2H 复制,序列化,保存本地和上传文件系统)进行拆分,实现高效的流水线执行。
避免内存重
感谢阅读!如果您对AI的更多资讯感兴趣,可以查看更多AI文章:GPTNB。



